[VIP第1年] 指数:3
[VIP第1年] 指数:3
根据机械手臂运动形式的不同,机械手可以分为四种形式:直角坐标式、圆柱坐标式,洗衣机拉伸机械手加工厂、极坐标式和多关节式。1、直角坐标式机械手:手臂在直角坐标系的三个坐标轴方向作直线移动,即手臂的前后伸缩、上下升降和左右移动。这种坐标形式占据空间大而工作范围却相对较小、惯性大,它适用于工作位置成直线排列的情况。2,洗衣机拉伸机械手加工厂、圆柱坐标式机械手:手臂作前后伸缩、上下升降和在水平面内摆的动作。与直角坐标式相比,所占空间较小而工作范围较大,洗衣机拉伸机械手加工厂,但由于机构结构的关系,高度方向上的较低位置受到限制,所以不能抓取地面上的物体,惯性也比较大。机械手用以按固定程序抓取、搬运物件或操作工具的自动操作装置。洗衣机拉伸机械手加工厂
自动化机械手具有以下一些特点:·、门类繁多,结构多样化,工业门类多,使用的机械因行业、加工的产品、功能与作用的不同,因而在原理与运动机构上有着很大差异,甚至完成同一职能的也会有不同的工作原理与不同的机构。如机械加工生产线加工同一种产品可以使用不同的设备,应用到的自动化机械手与自动生产线也有所不同;糖果包装机有着各种不同的工艺原理和结构;灯泡绕丝机因工艺原理的不同,有无芯、有芯连续和有芯不连续绕丝机之分。电饭锅冲压机械手使用气压驱动式,其驱动系统通常由气缸、气阀、气罐和空压机组成。
随着智能工业的快速发展,我越来越多的行业都用机械手替代了人工,那么我们常见的机械手有哪几种类型呢?按照驱动方式分类如下:机械手所用的驱动机构主要有4种:液压驱动、气压驱动、电气驱动和机械驱动。这里我们先来介绍下机械驱动式机械手,机械驱动式机械手只用于动作固定的场合。一般用凸轮连杆机构来实现规定的动作。其特点是动作确实可靠,工作速度高,成本低,但不易于调整。其他还有采用混合驱动,即液-气或电-液混合驱动。
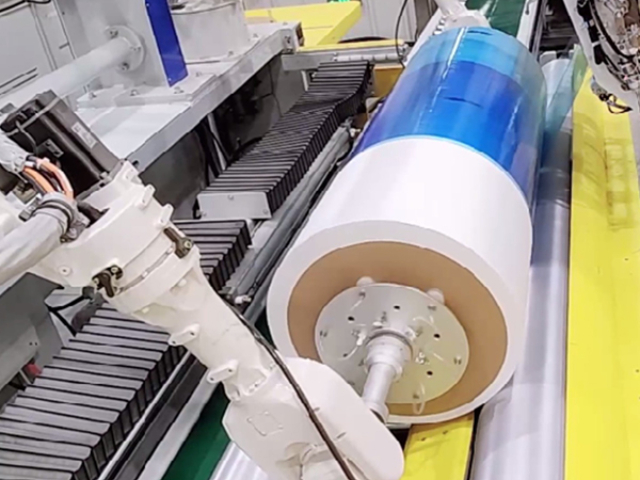
机械手的执行机构,机械手的执行机构分为手部、手臂、躯干;机械手的手部,手部安装在手臂的前端。手臂的内孔中装有传动轴,可把运用传给手腕,以转动、伸曲手腕、开闭手指。机械手手部的构造系模仿人的手指,分为无关节、固定关节和自由关节3种。手指的数量又可分为二指、三指、四指等,其中以二指用的较多。可根据夹持对象的形状和大小配备多种形状和大小的夹头以适应操作的需要。所谓没有手指的手部,一般都是指真空吸盘或磁性吸盘。工业机械手满足了社会生产的需要,并带来了经济收益。
工业机械手按驱动方式分:1、液压传动机械手,是以液压的压力来驱动执行机构运动的机械手。其主要特点是:抓重可达几百公斤以上、传动平稳、结构紧凑、动作灵敏。但对密封装置要求严格,不然油的泄漏对机械手的工作性能有很大的影响,且不宜在高温、低温下工作。若机械手采用电液伺服驱动系统,可实现连续轨迹控制,使机械手的通用性扩大,但是电液伺服阀的制造精度高,油液过滤要求严格,成本高。2、电力传动机械手即有特殊结构的感应电动机、直线电机或功率步进电机直接驱动执行机构运动的机械手,因为不需要中间的转换机构,故机械结构简单。其中直线电机机械手的运动速度快和行程长,维护和使用方便。此类机械手目前还不多,但有发展前途。机械手能在有害环境下操作以保护人身安全。洗衣机拉伸机械手加工厂
机械手是一种能模仿人手和臂的某些动作功能。洗衣机拉伸机械手加工厂
机械手分类:电气驱动式,电力驱动是机械手使用得较多的一种驱动方式。其特点是电源方便,响应快,驱动力较大(关节型的持重已达400kg),信号检测、传动、处理方便,并可采用多种灵活的控制方案。驱动电机一般采用步进电机,直流伺服电机(AC)为主要的驱动方式。由于电机速度高,通常须采用减速机构(如谐波传动、RV摆线针轮传动、齿轮传动、螺旋传动和多杆机构等)。有些机械手已开始采用无减速机构的大转矩、低转速电机进行直接驱动(DD)这既可使机构简化,又可提高控制精度。洗衣机拉伸机械手加工厂
文章来源地址: http://jxjxysb.cmgdjgsb.chanpin818.com/qtxyzysb/deta_18986384.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。